content:
Hello there,
For a personnel projet, I'm trying to detect object and there shadow. These are the result I have for now: Original:
 题,原始问题
题,原始问题
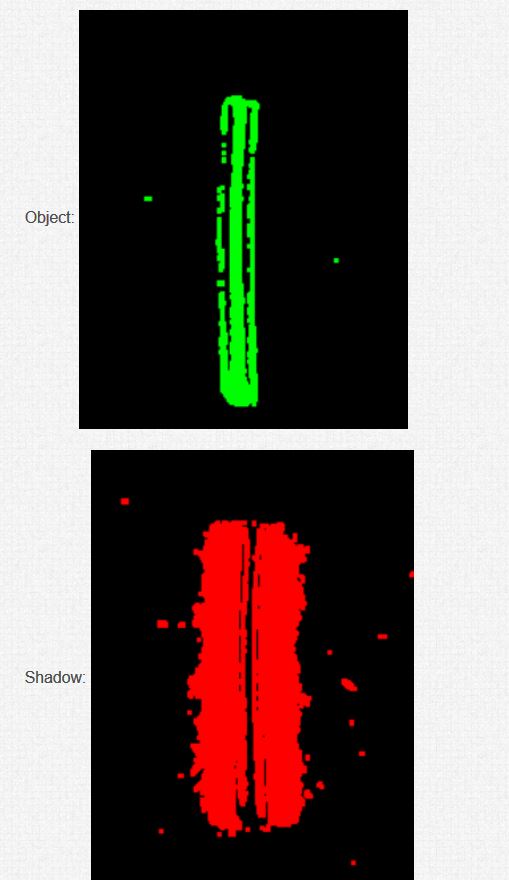
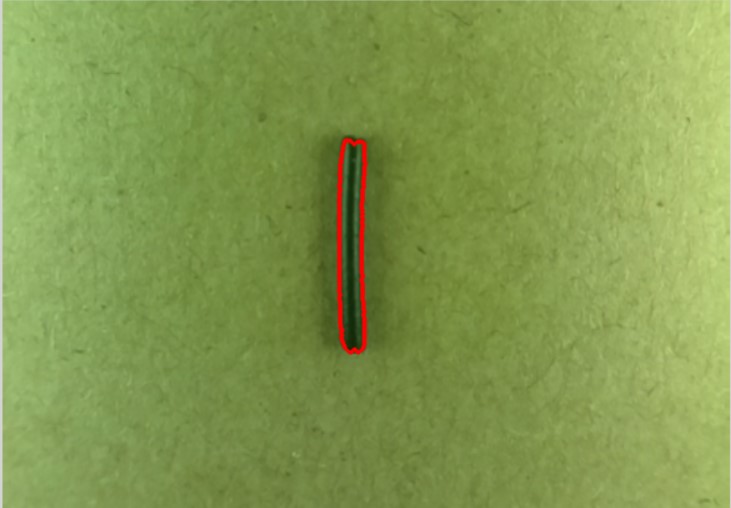
Object:
Shadow:
The external contours of the object are quite good, but as you can see, my object is not full. Same for the shadow. I would like to get full contours, filled, for the object and its shadow, and I don't know how to get better than this (I juste use "dilate" for the moment). Does someone knows a way to obtain a better result please? Regards.
从原始图片上来看,这张图片的拍摄的背景比较复杂,此外光照也存在偏光现象;而提问者虽然提出的是“将缝隙合并”的要求,实际上他还是想得到目标物体的准确轮廓。
基于现有经验,和OpenCV,GOCVhelper等工具,能够很快得出以下结果
h通道:
去光差:
阈值:
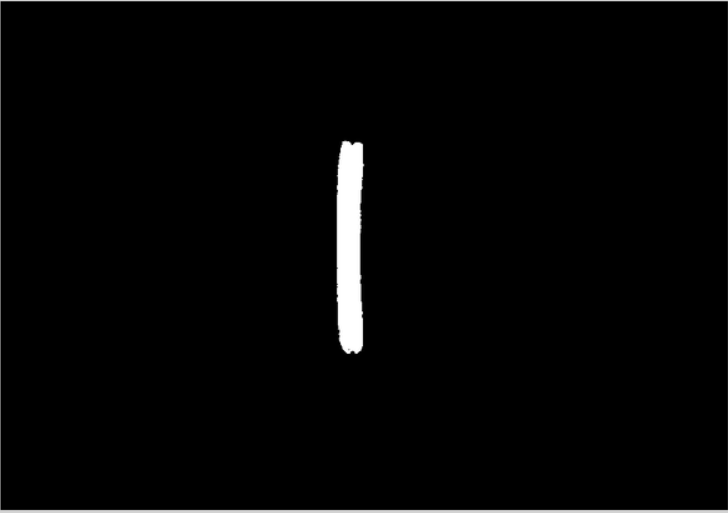
标注:
这套算法首先解决了这个问题,而且我认为也是稳健鲁棒的。其中,算法中除了经典的“hsv分解->ostu阈值->最大轮廓标注”外,最为关键的算法为顶帽去光差。这个算法来自于冈萨雷斯《数字图像处理教程》形态学篇章,完全按照书本建议实现,体现良好作用。
//answerOpenCV OpenCV / C++ - Filling holes //find the biggest contour vector<Point> FindBigestContour(Mat src){ std::vector<std::vector<Point> >contours; findContours(src,contours,CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE); for (int i=0;i<contours.size();i++){ int itmp = contourArea(contours[i]); if (imaxcontour < itmp ){ //remove Light difference by using top hat Mat moveLightDiff(Mat src,int radius){ Mat srcclone = src.clone(); Mat mask = Mat::zeros(radius*2,radius*2,CV_8U); circle(mask,Point(radius,radius),radius,Scalar(255),-1); erode(srcclone,srcclone,mask); dilate(srcclone,srcclone,mask); Mat src = imread("e:/sandbox/question.png"); cvtColor(src,src_hsv,COLOR_BGR2HSV); split(src_hsv, rgb_planes ); src_h = rgb_planes[0]; // h channel is useful src_h = moveLightDiff(src_h,40); threshold(src_h,bin,100,255,THRESH_OTSU); //find and draw the biggest contour vector<Point> bigestcontrour = FindBigestContour(bin); vector<vector<Point> > controus; controus.push_back(bigestcontrour); cv::drawContours(src,controus,0,Scalar(0,0,255),3); }
解决这个问题我只用了10分钟的时间,写博客10分钟。能够快速解决问题并书写出来的关键为:
1、积累维护的代码库:GOCVHelper(https://github.com/jsxyhelu/GOCvHelper)
2、不断阅读思考实践的习惯;
感谢阅读至此,希望有所帮助!